丰田资助自动驾驶项目LUCIDGames
2020-12-29 13:52来源:新交通
尽管许多自动驾驶汽车在模拟或初始测试中取得了令人瞩目的表现,但当在真实街道上测试时,它们往往无法根据周围其他车辆或行动者的轨迹或运动来调整自己的轨迹或运动。在需要一定程度协商的情况下更是如此,例如在十字路口或有多条车道的街道。
斯坦福大学的研究人员最近创建了LUCIDGames,这是一种计算技术,可以预测和规划自动驾驶汽车的自适应轨迹。他们在arXiv上发表的一篇论文中,提出了一种基于博弈论的算法和一种估算方法。
“随着过去几年自动驾驶技术的发展,我们注意到,某些驾驶操作,例如在无人保护的十字路口处左转,改变车道或合并到拥挤的高速公路上,对于自动驾驶仍然具有挑战性,而人类却可以很容易地执行它们。”进行这项研究的研究人员之一西蒙·勒克莱克(Simon Le Cleac'h)告诉TechXplore。“我们认为,这些互动涉及自动驾驶汽车与其周围汽车之间的重要交涉。”
人类通常能够找出其他司机在他们周围驾驶车辆的目标,并进行决策,比如在给定的十字路口谁先走。在他们的研究中,勒克莱克和他的同事们试图在自动驾驶汽车上复制这种能力,以及支持这种能力的复杂行为。他们的总体目标是让自动驾驶汽车识别周围其他车辆的目标,以便在涉及某种协商的情况下规划出更合适的轨迹。
“我们的工作结合了两种主要工具,一种是基于博弈论的算法,另一种是估算技术。”勒克莱克说。“基于博弈论的组件允许自动驾驶汽车在目标可能与自身目标不完全一致时,对与其他行动者(车辆、行人、骑自行车者等)的互动进行推理。另一方面,估算技术是允许自动驾驶汽车在与其他行动者互动时迅速发现潜在目标,例如,期望的速度、期望的车道或每辆车与自动驾驶汽车互动的攻击性程度。”
LUCIDGames是由勒克莱克和他的同事们提出的技术,旨在让自动驾驶汽车能够快速识别附近车辆和行人的目标。这使他们能够预测这些行动者未来的行为,并在它们周围安全操作,即使是在复杂的情况下也可以如此。
研究人员创建的系统由“评估者”和“决策者”组成。“评估者”是一种识别驾驶员目标的技术,而“决策者”是一种控制自动驾驶汽车转向角度和加速度的算法。决策者根据评估者收集的信息确定最适合车辆的轨迹。
“一开始,自动驾驶汽车并不知道旁边车辆的目标,因此评估者只能猜测车辆的目标。”勒克莱克解释道。“每猜一次,自动驾驶汽车就会预测汽车在接下来几秒内的轨迹,然后将预测结果与现实情况进行比较。在预测未来时最准确的猜测被保留了下来。”
在最初的训练之后,LUCIDGames会对与保留猜测非常接近的其他行动者的轨迹进行新的猜测,并评估它们的预测表现。通过每秒重复几次这个过程,它改进了自己的猜测,并最终预测出周围其他行动者将如何移动。
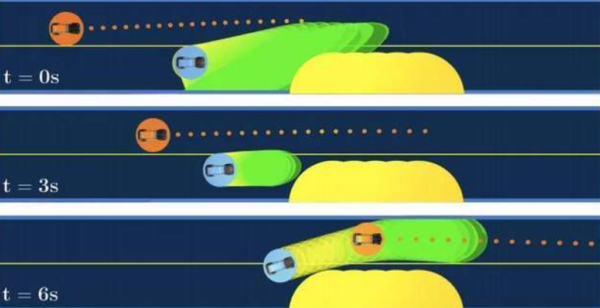
如上图所示,测试提供了一种场景的三条可视化路线,其中自动驾驶汽车(橙色)和人类驾驶的汽车(蓝色)必须在底部车道上越过较大的障碍物(黄色)。自动驾驶汽车根据LUCIDGames的要求,开始时,速度会减慢以避免不确定性的碰撞(绿色),包括两个可能性:要么是人类超车,要么是人类避让。
然后,通过观察人类司机的行为,自动驾驶汽车会更好地估算其目标,并缩小碰撞避免区,选择了第一个可能性。最后,自动驾驶车辆会在人类驾驶的汽车之前经过障碍物。自动驾驶汽车的计划轨迹由橙色圆点表示。
“通过我们的技术,自动驾驶汽车还能意识到什么时候它可以对自己的猜测有信心,什么时候有太多不确定性而降低信心。”勒克莱克说。“在这种不确定的情况下,它会采取更加谨慎的行动,与其他车辆保持更大的安全距离。”
勒克莱克和他的同事们设计的这项技术的评估组件,还允许自动驾驶汽车根据在街道上遇到的司机类型调整决策。例如,它可以确定驾驶员是否特别具有攻击性,从而允许决策组件相应地调整自动驾驶汽车的轨迹和运动(例如,与具有攻击性的驾驶员驾驶的车辆保持更大的安全距离)。
如果没有这种估算技术,不管周围的驾驶员是小心谨慎还是咄咄逼人,自动驾驶汽车都将以同样的方式移动,执行同样的动作,这可能会增加事故的风险。
勒克莱克表示:“我们已经看到,在与其他司机互动和协商很关键的情况下,将博弈论和评估的概念结合起来,是为自动驾驶汽车生成复杂驾驶行为的有效方法。我们的算法能够在现实的驾驶场景中,以足够快的速度为自动驾驶汽车进行估算和做出决定,使其适用于实际。”
在未来,LUCIDGames可以帮助提高自动驾驶汽车的安全性和可靠性,通过预测周围行动者的动作和行动,让它们以适应的方式移动。到目前为止,勒克莱克和他的同事们只在模拟中评估了这项技术,但他们现在计划在真正的自动驾驶汽车上进行测试。
勒克莱克表示:“我们的研究得到了丰田研究所(TRI)的部分资助,我们计划与TRI合作,在他们的汽车上测试LUCIDGames。我们的实验室(斯坦福大学的多机器人系统实验室)已经通过与斯坦福大学汽车研究中心(CARS)合作,在小型模型汽车和全尺寸自动驾驶汽车上进行了博弈论交互实验。”
责任编辑:新交通
您可能更感兴趣的文章