华为激光雷达新专利:兼具近距和远距探测功能
7月12日,华为技术有限公司发布一项专利:“一种激光雷达及车辆”,该激光雷达在结构上进行了创新,能够融合两种雷达的特点,同时具有近距探测功能和远距探测功能,同时减小了激光雷达的体积。
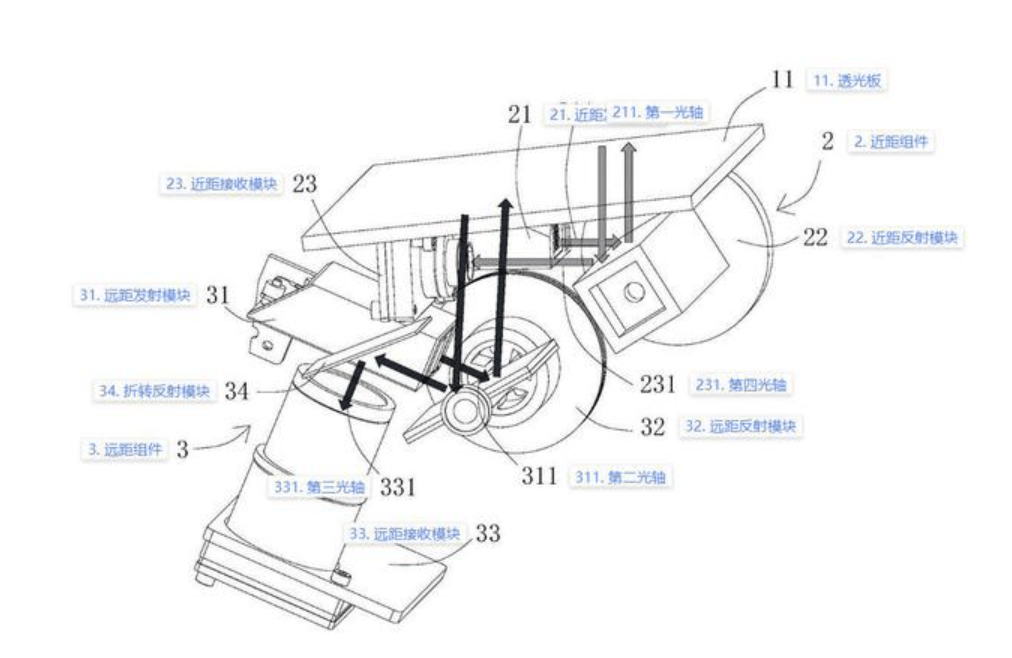
激光雷达包括:外壳、近距组件和远距组件。
外壳包括透光板,透光板用于激光透过;
近距组件安装于外壳, 并包括近距发射模块、近距接收模块和近距反射模块;
远距组件安装于外壳,并包括远距发射模块、远距接收模块和远距反射模块;
近距组件和远距组件集成于外壳的内腔。
其中,近距发射模块和远距发射模块用于发射激光,近距反射模块和远距反射模块用于反射激光,近距接收模块和远距接收模块用于接收激光;近距发射模块的第一光轴和远距发射模块的第二光轴之间的夹角 α满足10°≤α≤40°。
在一种可能的设计中,所述近距接收模块具有第一视场角FOV1,所述远距接收模块具有第二视场角FOV2,FOV2/FOV1≤1/5。
在本实施例中,若FOV2/FOV1过大,则FOV1相对过小,FOV2相对过大,则近距组件的视野范围过小,探测范围较小,远距组件的解析度过小,探测的准确度较低,近距组件与远距组件的探测效果都较差。因此,当FOV2/FOV1≤1/5时,激光雷达对远距和近距都能有较好的探测效果。
在一种可能的设计中,140°≤FOV1≤180°,能够在保证近距组件有足够大的视野范围的同时具有较高的解析度。
在一种可能的设计中,30°≤FOV2≤35°,能够在保证远距组件有足够大的视野范围的同时具有较高的解析度。
在一种可能的设计中,所述近距接收模块具有第一通光孔径D1,所述远距接收模块具有第二通光孔径D2,D2/D1≥5。
若D2/D1过小,则与第一通光孔径D1相比,第二通光孔径 D2过小,从而使远距接收模块的分辨率过低,影响激光雷达对于较远距离处的探测。
因此, 当D2/D1≥5能同时保证近距接收模块和远距接收模块都具有较高的解析度。
现阶段的激光雷达的确还面临诸多问题,其中之一在于难以保证同时具有近距探测功能和远距探测功能,华为此次公布的激光雷达的专利恰好给了解决这个问题一个很好的思路。从Yole 公布的2021年全球激光雷达市场数据来看,华为的全球份额是3%,全球排第13名,在中国企业中,排名第5名。使用华为激光雷达的主要是极狐阿尔法S Hi版、阿维塔11、机甲龙、哪吒S,这4款,目前开启交付的为阿尔法S Hi版。
关于激光雷达技术,马斯克曾公开表示,“激光雷达很愚蠢,任何使用激光雷达的(公司)都会完蛋”。这主要归于视觉感知和融合感知的自动驾驶技术两种路线之争。视觉感知最大的优势是成本低,只需几十美元,而激光雷达的价格却高至几百美元甚至更高,同时进展缓慢;然而相较于视觉感知,激光雷达感知能力更强、测量精度更高。