斯坦福大学新项目计划让自动驾驶汽车安全加塞
2021-01-06 16:08来源:智车科技
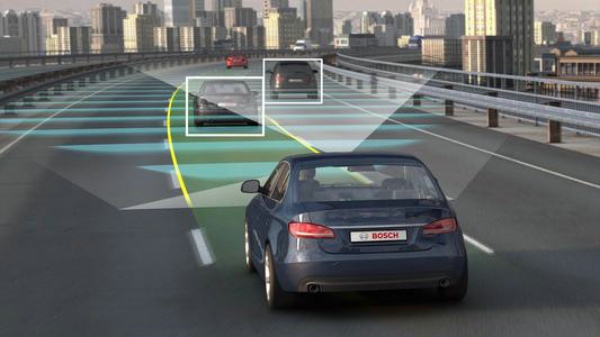
目前自动驾驶在场景测试中,比如车道汇入场景,往往会预先设定好周围车辆与行人的速度以及轨迹等,比如前车以60公里每小时的速度沿车道线方向行驶。然而在真实场景中,场景环境的数据并不能被提前告知,自动驾驶汽车往往还无法根据周围环境中其他车辆和人的动作或运行轨迹,进行自动调整。
斯坦福大学的研究人员最近创建了一个名为 LUCIDGames 新项目,这是一种可以预测和规划自动驾驶车辆自适应轨迹的计算技术,它集成了一种基于博弈论的算法和一种估计方法,能够预测周围的事物(代理)在未来会做什么,并在他们周围安全地做决策,即使在复杂的场景中也能应对自如。
LUCIDGames 通过在递归参数估计框架中建模来解决最优逆控制问题。它使用卡尔曼滤波器(UKF)迭代更新其他代理的成本函数的贝叶斯估计,随着从其他代理商观察到的轨迹收集到更多数据,在线上改进了该估计。然后,计划车辆通过规划受不确定性椭圆约束的机器人轨迹,来考虑其他代理车辆的贝叶斯参数估计中的不确定性。该算法假定机器人与环境中的其他主体之间没有明确的通信或协调。
LUCIDGames的MPC实现以40 Hz的更新频率演示了复杂自动驾驶场景下的实时性能。实验结果表明,LUCIDGames相对于现有的游戏理论和传统MPC规划方法,可以提高机器人的性能。
这个系统是由一个“估计器”(一种确定驾驶员目标的技术)和一个“决策者”(一种决定自动驾驶车辆转向角和加速度的算法)组成。决策者根据估算器收集的信息确定最适合车辆的轨迹。首先对轨迹进行预测,然后将其与现实情况进行比较。
经过最初的训练后,它将对其他车辆代理的轨迹的新猜测进行采样,使其接近保留的猜测并评估其预测性能。每次重复此过程以完善其猜测,最后得出有关其他周围因素如何移动的最终预测。
通过这种技术,自动驾驶汽车还可以知道何时可以对自己的猜测充满信心,以及何时信心较低。在这种不确定的情况下,它将采取更加谨慎的措施,并与其他车辆保持更大的安全距离。
将来,LUCIDGames有望增强自动驾驶汽车的安全性和可靠性。他们可以通过预测周围环境中车辆的移动和动作来以自适应方式移动。到目前为止,该团队仅在仿真中评估了该技术。现在,他们还计划在真正的自动驾驶汽车上进行测试。
责任编辑:新交通
您可能更感兴趣的文章